Considerando um braço de alavanca de massa desprezível d = r com uma das extremidades fixa na origem de um sistema de referência conforme a figura 01.

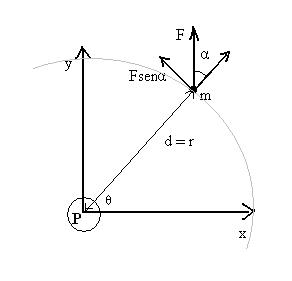
Figura 01: representação do diagrama de forças que atuam sobre um objeto de massa m que será forçado a se movimentar em torno de um ponto fixo.
Consideremos que na extremidade de r há um corpo de massa m. Ao produto da força aplicada na extremidade d da alavanca pela distância da alavanca d e o seno do ângulo entre a linha sobre a qual está o braço de alavanca e a direção da força aplicada chamamos torque, ou momento de força. Um exemplo muito comum de torque é quando se aplica uma força perpendicular ao cabo de uma chave, fazendo-a girar um parafuso em torno de um ponto fixo, conforme na figura 02.

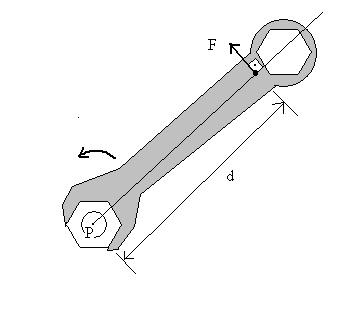
figura 02: representação de uma situação comum de aplicação de torque.
Matematicamente, o vetor torque τ é dado pelo produto vetorial entre os vetores r e F:
τ = rxF
Que equivale a:
τ = r.F.senθ
Onde τ é o torque;
r é a distância da força aplicada até o ponto fixo;
F é a força aplicada;
senθ é o seno do ângulo entre a força e o braço de alavanca d.
Quando θ é 90º senθ = 1 então a equação se reduz a:
τ = F.r
Se considerarmos um braço de alavanca d com comprimento r, teremos:
τ = F.d em N.m (no SI)
observe que é a mesma dimensão de energia, porém a unidade de energia é o joule e é simbolizada por J, no SI.
Leia mais:
Referências bibliográficas:
HALLIDAY, David, RESNIK Robert, KRANE, Denneth S. Física 1, volume 1, 4 Ed. Rio de Janeiro: LTC, 1996. 326 p.